Continue to describe methods for representing signals as superpositions of complex exponential functions.
Develop efficient methods for analyzing LTI systems.
Lecture #14:
THE LAPLACE TRANSFORM - METHOD OF SOLUTION
Motivation:
Continue to describe methods for representing signals as superpositions of complex exponential functions
Develop efficient methods for analyzing LTI systems
Outline:
Review of last lecture
Laplace transform of the family of singularity functions
More on the region of convergence
Analysis of networks with the Laplace transform — the impedance method
The Laplace transform represents a time function as a superposition of complex exponentials.
A time function is related uniquely to a Laplace transform if the ROC is specified.
If the Laplace transform of a sum of causal and anti-causal exponential time functions exists, its ROC is a strip in the s-plane parallel to the jω-axis.
I. LAPLACE TRANSFORMS OF SINGULARITY FUNCTIONS
1/ Unit impulse function
Recall the definition of the unit impulse
Hence,
for all values of s. The region of convergence is the entire s plane.
2/ Unit impulse function delayed — use of properties
The Laplace transform of an impulse located at t = 0 is
Using the delay property,
the Laplace transform of the delayed impulse is
and the region of convergence is the whole s plane.
Two-minute miniquiz problem
Problem 5-1
Find the Laplace transform including the ROC for
Solution
We use the Laplace transform of the causal exponential time function and time delay property to solve this problem.
3/ Singularity functions and their relatives
The Laplace transform of a unit impulse is
and from the Laplace transform of a causal exponential with α = 0 we have the Laplace transform of a causal step function
Note this fits together with the time differentiation property
since in a generalized function sense
We use the multiplication by t property
to obtain
and use it again to obtain
which implies that by induction
or
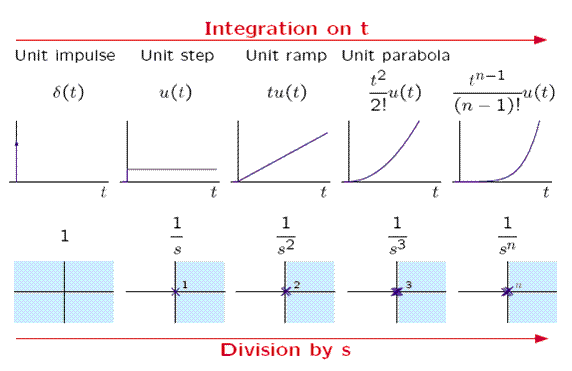
4/ Summary of singularity functions and their relatives
5/ Wild and crazy singularity functions
Since taking the derivative of a time function corresponds to multiplying the Laplace transform by s we can contemplate the derivative of the unit impulse called the unit doublet.
This process can be continued by taking successive derivatives of the impulse to form the unit triplet which has Laplace transform
, unit quadruplet, etc. In general, the nth derivative of the unit impulse has a Laplace transform
. We shall consider the usefulness of these higher order singularity functions later!