Analysis of DT systems using the Z-transform.
Insight into numerical methods for solving differential equations.
Lecture #16:
THE Z-TRANSFORM –
METHOD OF SOLUTION
Motivation:
Analysis of DT systems using the Z-transform
Insight into numerical methods for solving differential equations
Outline:
Review of last lecture
Analysis of ladder network
Analysis of discretized CT system
Conclusion
Review of last lecture
The Z-transform is capable of representing a rich class of DT time functions. Z-transform pairs can be obtained by combining
Z-transform properties
The Z-transforms of elementary time functions
Logic for an analysis method for DT LTI systems
characterizes system
compute
efficiently.
In steady state, response to
is
.
Represent arbitrary x[n] as superposition of
on z.
Compute response y[n] as superposition of
on z.
We will analyze DT systems with the Z-transform method in a manner analogous to the use of the Laplace transform for CT systems.
I. OVERVIEW OF TRANSFORM METHOD OF SOLUTION
Electric ladder network
1/ Difference equation
We wish to find the unit sample response of an electric ladder network (considered in a previous lecture), i.e., we assume
.
As we found in a previous lecture, KCL at node n yields the difference equation
2/ System function
We apply the Z-transform to the difference equation
to obtain
so that
The z-form of the system function is easier for identifying the poles and zeros; the
-form is easier for calculating the inverse transform.
3/ Response
implies that
with an ROC that is the whole z-plane. Therefore,
Thus, there is one zero and two poles. The poles are
It is easy to show that
. Hence we write the poles as
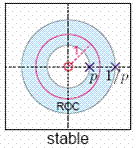
4/ Region of convergence
There are three possible ROCs for this response as shown below. On physical grounds, we expect the unit-sample response to be bounded.
Only the center ROC includes and unit circle and corresponds to a stable system.
Therefore, we conclude that
where the pole at z = p contributes to the causal response while the pole at z = 1/p contributes to the anti-causal response.
5/ Inverse Z-transform
We perform a partial fraction expansion as follows
which can be written as
Therefore,
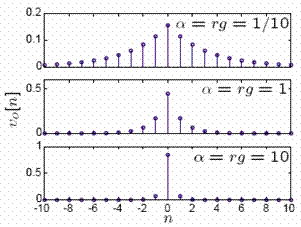
which can be written compactly as
As the quantity α = rg increases, the spatial distribution of voltage gets narrower and narrower. Recall that r is the series resistance and g is the shunt conductance of the ladder.
II. DISCRETIZED CT SYSTEM
1/ Differential equation — RC Circuit
In a previous lecture, we considered the CT lowpass filter shown below.