For K = 1000 determine the unit step response y(t) of the position control system.
Solution
Substituting K = 1000 into the system function yields
The denominator polynomial can be factored and expanded in a partial fraction expansion as follows
The step response is
Note that y(∞) = 0.9 which fits with the result obtained from the steady-state analysis which gives 1000/1100 ≈ 0.9.
A plot of the step response for K = 1000 along with those for several values of K are shown next.
How does the step response change as K is increased?
As the gain is increased, the steady-state error in position decreases.
As the gain is increased, the step response becomes a damped oscillation. This could be disastrous in a position control system. Suppose we designed a system for doing microsurgery on the brain or the eye!
Thus, we cannot achieve an arbitrarily small position error without causing damped oscillations with this controller design.
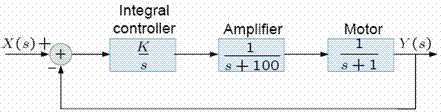
2/ Simple position control system with zero position error
Consider a new design in which the error is integrated.
We can use Black’s formula to find H(s) as follows
The steady-state response to a unit step is simply the response to the complex exponential
which is
. The position error ε = 1− 1 = 0. Hence, it appears that this position control system (with integral controller) has no position error for any value of K. So how do we pick K?
3/ Simple position control system with zero position error — step response
The step response is shown for several values of K.
The steady-state error is zero for K<10100 (we will see how this value is determined later).
The step response shows oscillations that are damped for K<10100 but shows oscillations whose amplitude grows exponentially for K>10100. Such a system is called unstable. When the system becomes unstable, the steady-state position error is not zero! Furthermore, a position control system that is unstable is even more disastrous than one that exhibits damped oscillations in response to a unit step.
4/ BIBO stability
There are many ways one can define stability of a system. We shall use the following. A system for which every bounded input yields a bounded output is called BIBO stable. A feedback system with closed loop system function
is BIBO stable if its poles (the natural frequencies of the closed loop system) are in the left half of the s-plane. Thus, determining the conditions for which a system is stable reduces to finding whether the zeros of 1+β(s)K(s) = 0 are in the left-half s-plane. When β(s)K(s) is a rational function, this condition is tested by determining whether the roots of the numerator polynomial of 1+β(s)K(s) are located in the left-half s-plane.