These are determined from N initial conditions which must be specified. These conditions result in a set of N algebraic equations that need to be solved to obtain the initial conditions. We shall find another, and simpler, method to determine these coefficients later.
2/ Steady-state
Assume the particular solution is not zero. Then the particular solution dominates after some time, if the homogeneous solution decays more rapidly than does the particular solution. When this occurs, we call the resulting particular solution the steady-state response. Steady-state occurs if each term in the homogeneous solution decays more rapidly than the particular solution. Thus, steady-state occurs if
Thus
which implies that
Thus, steady-state occurs when
for all
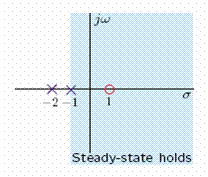
provided the particular solution is not zero. The conditions for steady state are depicted in the complex s plane below.
The particular solution dominates for s in the shaded region, and the total solution equals the steady-state solution i.e.,
For which conditions is the particular solution zero? Suppose
The particular solution dominates for s in the shaded region, and the total solution equals the steady-state solution except when s = 1 because at this value i.e.,
so that the particular solution is zero and steady -state does not occur.
IX. LINEAR DIFFERENCE EQUATIONS ARISE IN MANY DIFFERENT CONTEXTS
1/ Electric ladder network
r is the series resistance and g is the shunt conductance.
KCL at the central node yields
which yields the linear difference equation
2/ Interest and accumulation
Let us consider a simple model of the accumulation of wealth through savings. At the end of year n you deposit x[n] dollars in the bank which pays an annual interest of r. Your accumulation at the end of year n is y[n]dollars. Therefore,
We can rewrite this equation as
y[n+1] − (1+r)y[n]= x[n]
This difference equation can be realized in a block diagram as shown below.
D is a unit delay unit.
3/ Discretized CT system
An important application of DT systems is a numerical simulation of a CT system. For example, consider the CT lowpass filter shown below.
The differential equation is
To solve this equation numerically in a computer, the CT signals are discretized and the derivative is approximated.
To discretize the signals, we can define DT signals as samples of CT signals, i.e.,
and
The derivative can be approximated as follows
Therefore, we can approximate the differential equation as
which can be written as
Let
= T/(RC). Then the difference equation is
This equation can be solved iteratively for a given input and initial condition. Assume that
and that
then