

| << Chapter < Page | Chapter >> Page > |
A reference frame moving at constant velocity relative to an inertial frame is also inertial. A reference frame accelerating relative to an inertial frame is not inertial.
Are inertial frames common in nature? It turns out that well within experimental error, a reference frame at rest relative to the most distant, or “fixed,” stars is inertial. All frames moving uniformly with respect to this fixed-star frame are also inertial. For example, a nonrotating reference frame attached to the Sun is, for all practical purposes, inertial, because its velocity relative to the fixed stars does not vary by more than one part in Earth accelerates relative to the fixed stars because it rotates on its axis and revolves around the Sun; hence, a reference frame attached to its surface is not inertial. For most problems, however, such a frame serves as a sufficiently accurate approximation to an inertial frame, because the acceleration of a point on Earth’s surface relative to the fixed stars is rather small ( ). Thus, unless indicated otherwise, we consider reference frames fixed on Earth to be inertial.
Finally, no particular inertial frame is more special than any other. As far as the laws of nature are concerned, all inertial frames are equivalent. In analyzing a problem, we choose one inertial frame over another simply on the basis of convenience.
Newton’s first law tells us about the equilibrium of a system, which is the state in which the forces on the system are balanced. Returning to Forces and the ice skaters in [link] , we know that the forces and combine to form a resultant force, or the net external force: To create equilibrium, we require a balancing force that will produce a net force of zero. This force must be equal in magnitude but opposite in direction to which means the vector must be Referring to the ice skaters, for which we found to be , we can determine the balancing force by simply finding See the free-body diagram in [link] (b).
We can give Newton’s first law in vector form:
This equation says that a net force of zero implies that the velocity of the object is constant. (The word “constant” can indicate zero velocity.)
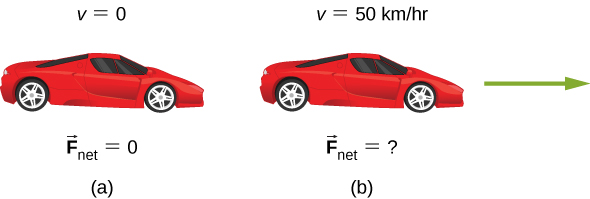
Newton’s first law is deceptively simple. If a car is at rest, the only forces acting on the car are weight and the contact force of the pavement pushing up on the car ( [link] ). It is easy to understand that a nonzero net force is required to change the state of motion of the car. However, if the car is in motion with constant velocity, a common misconception is that the engine force propelling the car forward is larger in magnitude than the friction force that opposes forward motion. In fact, the two forces have identical magnitude.
Notification Switch
Would you like to follow the 'University physics volume 1' conversation and receive update notifications?

|
|
|
|
|

|
|

|
|

|
|
|
|
|

|
|

|
|
|
|
|

|