From
[link] (a), we see the force vectors involved in preventing the wheel from slipping. In (b), point
P that touches the surface is at rest relative to the surface. Relative to the center of mass, point
P has velocity
, where
R is the radius of the wheel and
is the wheel’s angular velocity about its axis. Since the wheel is rolling, the velocity of
P with respect to the surface is its velocity with respect to the center of mass plus the velocity of the center of mass with respect to the surface:
Since the velocity of
P relative to the surface is zero,
, this says that
Thus, the velocity of the wheel’s center of mass is its radius times the angular velocity about its axis. We show the correspondence of the linear variable on the left side of the equation with the angular variable on the right side of the equation. This is done below for the linear acceleration.
If we differentiate
[link] on the left side of the equation, we obtain an expression for the linear acceleration of the center of mass. On the right side of the equation,
R is a constant and since
we have
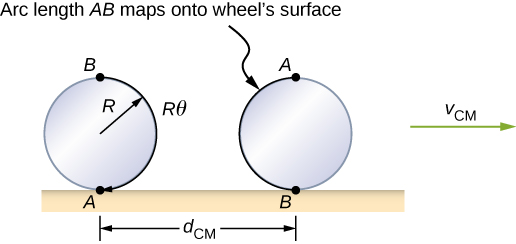
Furthermore, we can find the distance the wheel travels in terms of angular variables by referring to
[link] . As the wheel rolls from point
A to point
B , its outer surface maps onto the ground by exactly the distance travelled, which is
We see from
[link] that the length of the outer surface that maps onto the ground is the arc length
. Equating the two distances, we obtain
As the wheel rolls on the surface, the arc length
from
A to
B maps onto the surface, corresponding to the distance
that the center of mass has moved.
Rolling down an inclined plane
A solid cylinder rolls down an inclined plane without slipping, starting from rest. It has mass
m and radius
r . (a) What is its acceleration? (b) What condition must the coefficient of static friction
satisfy so the cylinder does not slip?
Strategy
Draw a sketch and free-body diagram, and choose a coordinate system. We put
x in the direction down the plane and
y upward perpendicular to the plane. Identify the forces involved. These are the normal force, the force of gravity, and the force due to friction. Write down Newton’s laws in the
x - and
y -directions, and Newton’s law for rotation, and then solve for the acceleration and force due to friction.
Solution
The free-body diagram and sketch are shown in
[link] , including the normal force, components of the weight, and the static friction force. There is barely enough friction to keep the cylinder rolling without slipping. Since there is no slipping, the magnitude of the friction force is less than or equal to
. Writing down Newton’s laws in the
x - and
y -directions, we have
A solid cylinder rolls down an inclined plane without slipping from rest. The coordinate system has
x in the direction down the inclined plane and
y perpendicular to the plane. The free-body diagram is shown with the normal force, the static friction force, and the components of the weight
. Friction makes the cylinder roll down the plane rather than slip. Substituting in from the free-body diagram,
we can then solve for the linear acceleration of the center of mass from these equations:
However, it is useful to express the linear acceleration in terms of the moment of inertia. For this, we write down Newton’s second law for rotation,
The torques are calculated about the axis through the center of mass of the cylinder. The only nonzero torque is provided by the friction force. We have
Finally, the linear acceleration is related to the angular acceleration by
These equations can be used to solve for
in terms of the moment of inertia, where we have dropped the
x -subscript. We write
in terms of the vertical component of gravity and the friction force, and make the following substitutions.
From this we obtain
Note that this result is independent of the coefficient of static friction,
.
Since we have a solid cylinder, from
[link] , we have
and
Therefore, we have
Because slipping does not occur,
. Solving for the friction force,
Substituting this expression into the condition for no slipping, and noting that
, we have