

| << Chapter < Page | Chapter >> Page > |
where we have taken the limit of the average angular acceleration, as .
The units of angular acceleration are (rad/s)/s, or .
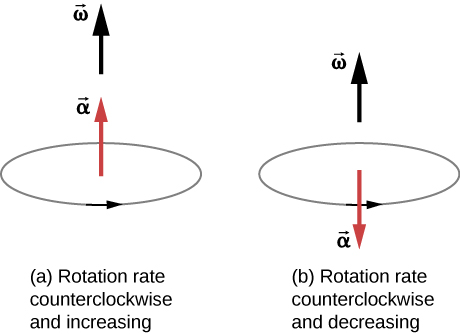
In the same way as we defined the vector associated with angular velocity , we can define , the vector associated with angular acceleration ( [link] ). If the angular velocity is along the positive z- axis, as in [link] , and is positive, then the angular acceleration is positive and points along the axis. Similarly, if the angular velocity is along the positive z- axis and is negative, then the angular acceleration is negative and points along the axis.
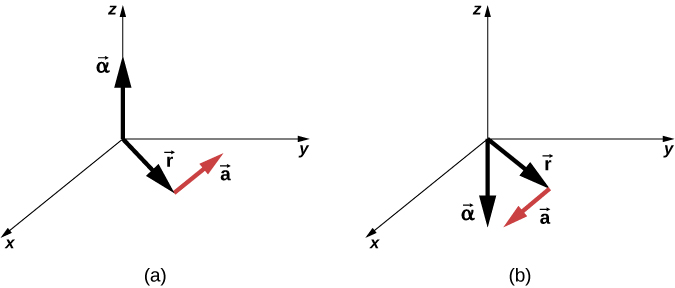
We can express the tangential acceleration vector as a cross product of the angular acceleration and the position vector. This expression can be found by taking the time derivative of and is left as an exercise:
The vector relationships for the angular acceleration and tangential acceleration are shown in [link] .
We can relate the tangential acceleration of a point on a rotating body at a distance from the axis of rotation in the same way that we related the tangential speed to the angular velocity. If we differentiate [link] with respect to time, noting that the radius r is constant, we obtain
Thus, the tangential acceleration is the radius times the angular acceleration. [link] and [link] are important for the discussion of rolling motion (see Angular Momentum ).
Let’s apply these ideas to the analysis of a few simple fixed-axis rotation scenarios. Before doing so, we present a problem-solving strategy that can be applied to rotational kinematics: the description of rotational motion.
Notification Switch
Would you like to follow the 'University physics volume 1' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|
|
|
|
|
|
|

|
|
|
|