

| << Chapter < Page | Chapter >> Page > |
Là hệ có tín hiệu không liên tục .
a) Nếu tín hiệu có dạng một loạt chuỗi xung (pulse train ), thì hệ được gọi là hệ dữ liệu mẫu hóa ( sample data system ).
b) Nếu tín hiệu là xung được mã hóa số thích hợp cho việc sử dụng digital computer thì gọi là hệ điều khiển digital.
Thí dụ: Hệ điều khiển máy đánh chữ điện tử là một hệ điều khiển digital, vì bộ xử lý nhận và cho ra các số liệu digital.
Một cách tổng quát, một hệ dữ liệu mẫu hóa chỉ nhận số liệu và thông tin một cách ngắt quãng tại những thời điểm riêng. Thí dụ: tín hiệu sai số trong hệ có thể được cung cấp ngắt quãng dưới dạng xung. Như vậy hệ sẽ không nhận thông tin về sai số suốt trong giai đoạn giữa hai xung liên tiếp.
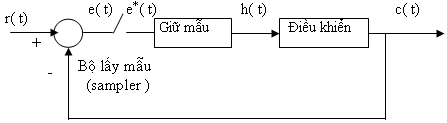
H.1_12 : Sơ đồ khối một hệ điều khiển dữ liệu mẫu hóa.
Một tín hiệu vào liên tục r(t) được đưa vào hệ thống. Tín hiệu sai số e(t) được lấy mẫu ( sampling). Ngõ ra của bộ phận lấy mẫu ( sampler) là một loạt xung. Tần số lấy mẫu có thể đều hay là không.
Hình H.1_13 là sơ đồ khối cơ bản của hệ thống điều khiển digital để hướng dẫn quỹ đạo tên lửa autopilot tự tìm mục tiêu.

H.1_13 : Sơ đồ khối cơ bản của hệ thống điều khiển quỹ đạo tên lửa tự tìm mục tiêu.
Một loại hệ thống điều khiển đáng được đặc biệt lưu tâm do tính thịnh hành của nó trong kỹ nghệ và ngôn ngữ điều khiển học. Đó là servomechanism.
Một servomechanism là một hệ điều khiển tự động, trong đó biến số kiểm soát C là vị trí cơ học, hoặc đạo hàm theo thời gian của vị trí( vận tốc hay gia tốc).
Thí dụ : Xem một bộ điều khiển tự đôïng đóng mở van nước.

H.1_14: Servo mechanism điều khiển van.
Ngõ vào của hệ thống là một biến trở loại quay P1, được đấu với nguồn điện. Chân thứ 3( con chạy) được quy chuẩn theo vị trí góc ( radians) và đấu vào một ngõ vào của mạch khuếch đại servo. Mạch khuếch đại này cung cấp đủ điện thế cho một động cơ điện gọi là servo motor. Trục của motor được truyền ( cơ khí ) đến một van để mở hay khóa nước. Nếu trục motor quay 3600 thì van mở hoàn toàn.
P2 gọi là biến trở hồi tiếp. Chân thứ 3 được nối ( cơ khí ) với trục motor nhờ một bánh răng và đấùu ( điện ) với ngõ vào thứ hai của mạch khuếch đại servo.
Tùy vị trí con chạy của hai biến trở, mà điện thế sai biệt e có thêû dương, âm hay bằng zero. Điện thế này được khuếch đại, sau đó đặt vào motor đêû điều khiển motor quay theo chiều mở van, đóng van hay vẩn giữ van ở vị trí củ ( e= 0; khi đo ùmotor không quay). Giã sử van đang đóng, ta quay P1 một góc (để đặt một tiêu chuẩn tham khảo ở ngõ vào ). Điện thế e mất cân bằng ( khác 0), làm cho motor quay một góc ( thích ứng với góc quay của con chạy P1 ) làm van mở. Đồng thời, qua bộ bánh răng truyền động , con chạy P2 cũng quay một góc sao cho điện thế sai biệt e trở về 0 (motor không quay ). Van được giữ ở độ mở ấy.
Hệ thống trên được trình bày bằng sơ đồ khối như sau :

H.1_15 : Sơ đồ khối servomechamism điều khiển van.
Một số thí dụ :
H.1_16
a. Từ các định luật Kirchhoff, ta có :
v2 = R2. i
i= v1/ (R1 + R2 )
Vậy v2 =( R2 / (R1 + R2 )).v1= f(v1,R1,R2)
b. Nếu biết dòng i dưới dạng khác hơn:
i = ( v1-v2 ) / R1 thì:
v2 = R2 ( v1 – v2 ) / R1 = v1 . R2 / R1 –v2 .R2 /R1
= f (v1, v2, R1, R2 )
2. Hệ thống tự điều khiển để tay người chạm đến một đồ vật, có thể nhận dạng như sau : các bộ phận chính của hệ là óc, cánh tay, bàn tay và mắt.
***SORRY, THIS MEDIA TYPE IS NOT SUPPORTED.***
Hình 1.19
Bộ óc gởi tín hiệu thần kinh đến cánh tay. Tín hiệu này được khuếch đại trong các bắp thịt của cánh tay và bàn tay, và xem như các tín hiệu tác động của hệ thống. Mắt dùng như bộ cảm biến, hồi tiếp liên tục vị trí của cánh tay và vị trí vật đến óc.
Vị trí tay là output của hệ, vị trí vật là input. Mục đích của hệ điều khiển là thu nhỏ khoảng cách của vị trí tay và vị trí vật đến zero.

H.1_20
3. Định luật cung cầu của kinh tế học có thể được xem như một hệ điều khiển tự động. Giá bán ( giá thị trường ) của một hàng hóa nào đó là output của hệ. Mục tiêu của hệ là giữ cho giá ổn định.
Định luật cung cầu cho rằng giá thị trường ổn định nếu và chỉ nếu cung bằng cầu.
Ta chọn 4 bộ phận chính của hệ thống là người cung, người cầu, người định giá thị trường, ở đó hàng hóa được mua và bán.
Input là sự ổn định của vật giá, hay tiện lợi hơn, là sự nhiễu loạn giá bằng zero. Output là giá thực tế của thị trường.
Sự hoạt đôïng của hệ thống được giải thích như sau :
Người định giá nhận một tín hiệu (zero) khi vật giá ổn định. Ông ta định một giá bán với sự giúp đỡ của những thông tin từ trí nhớ hay giá biểu của sự giao dịch trước đó. Giá này làm người cung sản xuất đưa vào thị trường một lượng hàng hóa nào đó, và người cầu mua một số trong số đó. Sự chênh lệch (sai số ) giữa cung và cầu được điều chỉnh bởi hệ thống này. Nếu cung không bằng cầu, người định giá sẽ thay đổi giá thị trường theo hướng sau cho cung bằng với cầu. Vậy cả cung và cầu đều có thêû xem là hồi tiếp vì chúng xác định tác động kiểm soát . Hệ thống được biểu diễn như H.1_21.

H.1_21
Notification Switch
Would you like to follow the 'Điều khiển tự động' conversation and receive update notifications?

|
|

|
|
|
|
|

|
|

|
|

|
|
|
|
|

|
|

|
|
|
|