The output
of a continuous-time linear time-invariant (LTI) system is related to its input
and the system impulse response
through the convolution integral expressed as (for details on the theory of convolution and LTI systems, refer to signals and systems textbooks, for example, references
[link] -
[link] ):
For a computer program to perform the above continuous-time convolution integral, a numerical approximation of the integral is needed noting that computer programs operate in a discrete – not continuous – fashion. One way to approximate the continuous functions in the Equation (1) integral is to use piecewise constant functions. Define
to be a rectangular pulse of width
and height 1, centered at
:
Approximate a continuous function
with a piecewise constant function
as a sequence of pulses spaced every
seconds in time with heights
:
It can be shown in the limit as
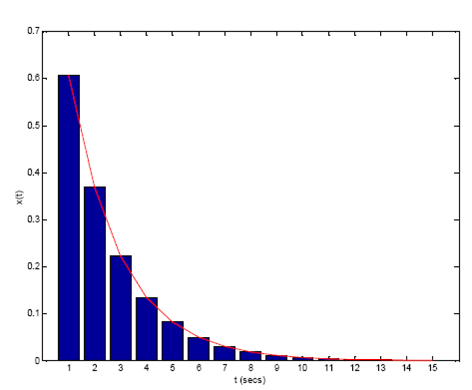
. As an example,
[link] shows the approximation of a decaying exponential
starting from 0 using
. Similarly,
can be approximated by
One can thus approximate the convolution integral by convolving the two piecewise constant signals as follows:
Approximation of a Decaying Exponential with Rectangular Strips of Width 1
Notice that
is not necessarily a piecewise constant. For computer representation purposes, discrete output values are needed, which can be obtained by further approximating the convolution integral as indicated below:
If one represents the signals
and
in a .m file by vectors containing the values of the signals at
, then Equation (5) can be used to compute an approximation to the convolution of
and
. Compute the discrete convolution sum
with the built-in LabVIEW MathScript command
conv . Then, multiply this sum by
to get an estimate of
at
Note that as
is made smaller, one gets a closer approximation to
.
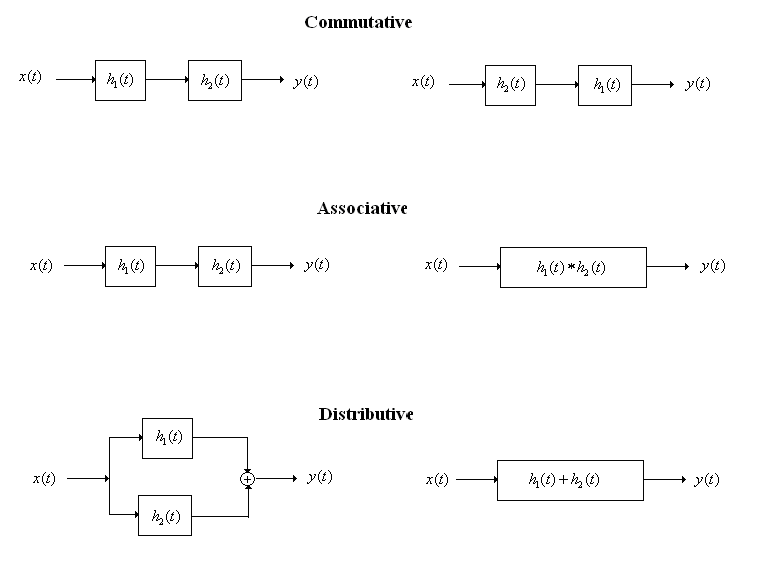
Convolution properties
Convolution satisfies the following three properties (see
[link] ):
Receive real-time job alerts and never miss the right job again
Source:
OpenStax, An interactive approach to signals and systems laboratory. OpenStax CNX. Sep 06, 2012 Download for free at http://cnx.org/content/col10667/1.14
Google Play and the Google Play logo are trademarks of Google Inc.
Notification Switch
Would you like to follow the 'An interactive approach to signals and systems laboratory' conversation and receive update notifications?