

| << Chapter < Page | Chapter >> Page > |
Point Matrix. To represent a straight-line image in computer memory, we must store a list of all the endpoints of the line segments that comprise the image. If the point is such an endpoint, we write it as the column vector
Suppose there are such endpoints in the entire image. Each point is included only once, even if several lines end at the same point. We can arrange thevectors into a point matrix:
We then store the point matrix as a two-dimensional array in computer memory.
Consider the list of points
The corresponding point matrix is
Line Matrix. The next thing we need to know is which pairs of points to connect with lines. To store this information for lines, we will use a line matrix, . The line matrix does not store line locations directly. Rather, it contains references to the points stored in . To indicate a line between points and , we store the indices and as a pair. For the line in the image, we have the pair
The order of and does not really matter since a line from to is the same as a line from to . Next we collect all the lines into a line matrix :
All the numbers in the line matrix will be positive integers since they point to columns of . To find the actual endpoints of a line, we look at columns and of the point matrix .
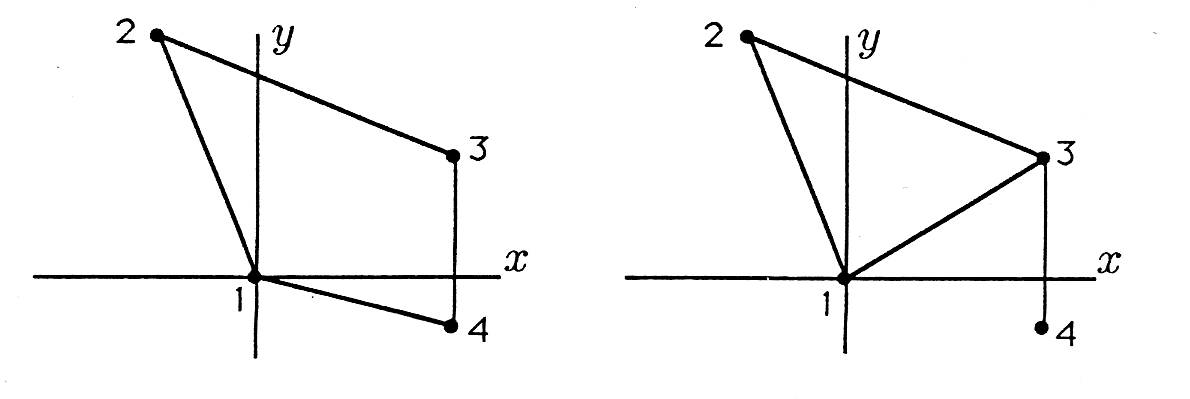
To specify line segments connecting the four points of Example 1 into a quadrilateral, we use the line matrix
Alternatively, we can specify line segments to form a triangle from the first three points plus a line from to :
Figure 1 shows the points connected first by and then by
Demo 1 (MATLAB) . Use your editor to enter the following MATLAB function file. Save it as vgraphl.m.
After you have saved the function file, run MATLAB and type the following to enter the point and line matrices. (We begin with the transposesof the matrices to make them easier to enter.)
At this point you should use MATLAB's “save” command to save these matrices to a disk file. Type
After you have saved the matrices, use the functionto draw
the image by typing
VGRAPH1
The advantage of storing points and lines separately is that an object can be moved and scaled by operating only on the point matrix . The line information in remains the same since the same pairs of points are connected no matter where we put the points themselves.
Surfaces and Objects. To describe a surface in three dimensions is a fairly complex task, especially if the surface is curved. For this reason, we willbe satisfied with points and lines, sometimes visualizing flat surfaces based on the lines. On the other hand, it is a fairly simple matter to group the pointsand lines into distinct objects . We can define an object matrix K with one column for each object giving the ranges of points and lines associated withthat object. Each column is defined as
As with the line matrix , the elements of are integers.
Consider again Demo 1 . We could group the points in and the lines in into two objects with the matrix
The first column of specifies that the first object (Ursa Minor) is made up of points 1 through 7 and lines 1 through 6, and the second column of defines the second object (Ursa Major) as points 8 through 14 and lines 7 through 12.
Notification Switch
Would you like to follow the 'A first course in electrical and computer engineering' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|