Example — reconstruction of differential equation from H(s)
Suppose
what is the differential equation that relates y(t) to x(t)? Cross-multiply the equation and multiply both sides by
to obtain
which yields
from which we can obtain the differential equation
2/ Poles and zeros
H(s) can be expressed in factored form as follows
where
are the roots of the numerator polynomial and are called zeros of H(s) because these are the values of s for which H(s) = 0.
are the roots of the denominator polynomial and are called poles of H(s) because these are the values of s for which
.
a/ Poles are the natural frequencies
Note that poles of H(s) are the natural frequencies of the system. Recall that natural frequencies are given by the roots of the characteristic polynomial
and the poles are the roots of denominator polynomial of H(s)
Both originate from the left-hand side of the differential equation
b/ Pole-zero diagram
H(s) characterizes the differential equation and H(s) is characterized by N + M + 1 numbers: N poles, M zeros, and the constant K. Except for the multiplication factor K, H(s) is characterized by a pole-zero diagram which is a plot of the locations of poles and zeros in the complex-s plane. The ordinate is
and the abscissa is
where
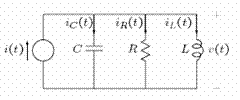
Example — system function of a network
The differential equation relating v(t) to i(t) is
The particular solution is obtained from
With v(t) as the output and i(t) as the input, the system function of the RLC network is
Two-minute miniquiz problem
Problem 3-1
Given the system function
Determine the natural frequencies of the system.
Determine a differential equation that relates x(t) and y(t).
Solution
The natural frequencies of the system are the poles of the system function and are −3 and −4.
The differential equation can be obtained by cross multiplying and multiplying by
to obtain
so that
VIII. TOTAL SOLUTION
The general solution is
and
y(t)=0 for t<0
Hence, provided there are no singularity functions (e.g., impulses) at t = 0, the general solution can be written compactly as follows
As we shall see later, no singularity functions occur in the response provided the order of the numerator polynomial of H(s) does not exceed that of the denominator.
1/ Initial conditions
To completely determine the total solution we need to determine the N coefficients