To describe man-made and natural systems, in forms of mathematical expressions in time and in frequency domains. Many physical systems are described by linear differential equations or by linear difference equations.
Lecture #2:
INTRODUCTION TO SYSTEMS
Motivation: To describe man-made and natural systems, in forms of mathematical expressions in time and in frequency domains. Many physical systems are described by linear differential equations or by linear difference equations.
Outline:
Man-made systems — modular, hierarchic design. Natural systems — modular, hierarchic analysis. Dynamic analogies
Classification of systems
Reducing differential equations to algebraic equations by using complex notations. Role of complex exponential time functions in LTI systems. Sources of linear differential equations. Homogeneous solution — exponential solution, natural frequencies. Particular solution — system function, poles&zeros. Total solution — initial conditions, steady-state.
Reducing difference equations to algebraic equations. Role of complex geometric (exponential) time functions in DT LTI systems. Linear difference equations arise as system. Homogeneous solution — geometric (exponential) solution, natural frequencies. Particular solution — system function, poles&zeros. Total solution — initial conditions, steady-state.
Signals and systems
This subject deals with mathematical methods used to describe signals and to analyze and synthesize systems.
Signals are variables that carry information
Systems process input signals to produce output signals.
Last time — SIGNALS; Today — SYSTEMS.
I. MAN-MADE SYSTEMS — MODULAR, HIERARCHIC DESIGN
Robot car
1/ Robot car block diagram
Hierarchic design — top (1st) level includes: wheel position controller, digital camera, and image processing software.
2/ Wheel position controller block diagram
Hierarchic design — 2nd level is a block diagram of the wheel controller which includes: amplifier, motor, and shaft decoder.
3/ Motor dynamics
Hierarchic design—3rd level includes a more detailed description of the motor. Important quantities are:
Current in motor windings i(t),
Motor shaft angular displacement θ(t),
Motor parameters — viscous damping constant B, moment of inertia J, electromechanical constant k.
The torque balance equation is:
4/ Observation
Man-made complex systems are designed in a modular, hierarchical fashion often expressed in nested block diagrams.
Block input/output relations provide a communication mechanism for team projects.
Optimization of system performance requires excellent tools to characterize signal transformations at each level of the hierarchy.
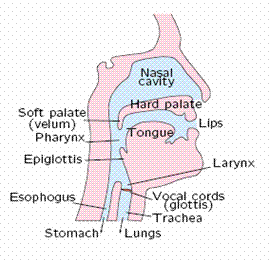
II. NATURALLY OCCURRING SYSTEMS — MODULAR, HIERARCHIC ANALYSIS
Human speech production system — anatomy
1/ Human speech production system — block diagram
2/ Observation
Naturally occurring systems are not designed in a modular fashion — they have evolved.
To understand these systems, we impose a hierarchy and parse the system into modules whose function can be characterized.