

| << Chapter < Page | Chapter >> Page > |
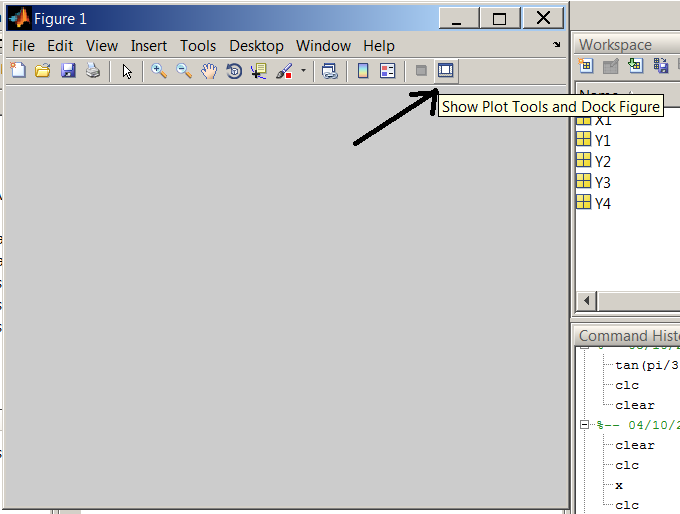
Note that the above script clears the command window and variable workspace. It also closes any open Figures. After running the script, we will have X1, Y1, Y2, Y3 and Y4 loaded in the workspace. Next, select File>New>Figure, a new Figure window will open. Click "Show Plot Tools and Dock Figure" on the tool bar.
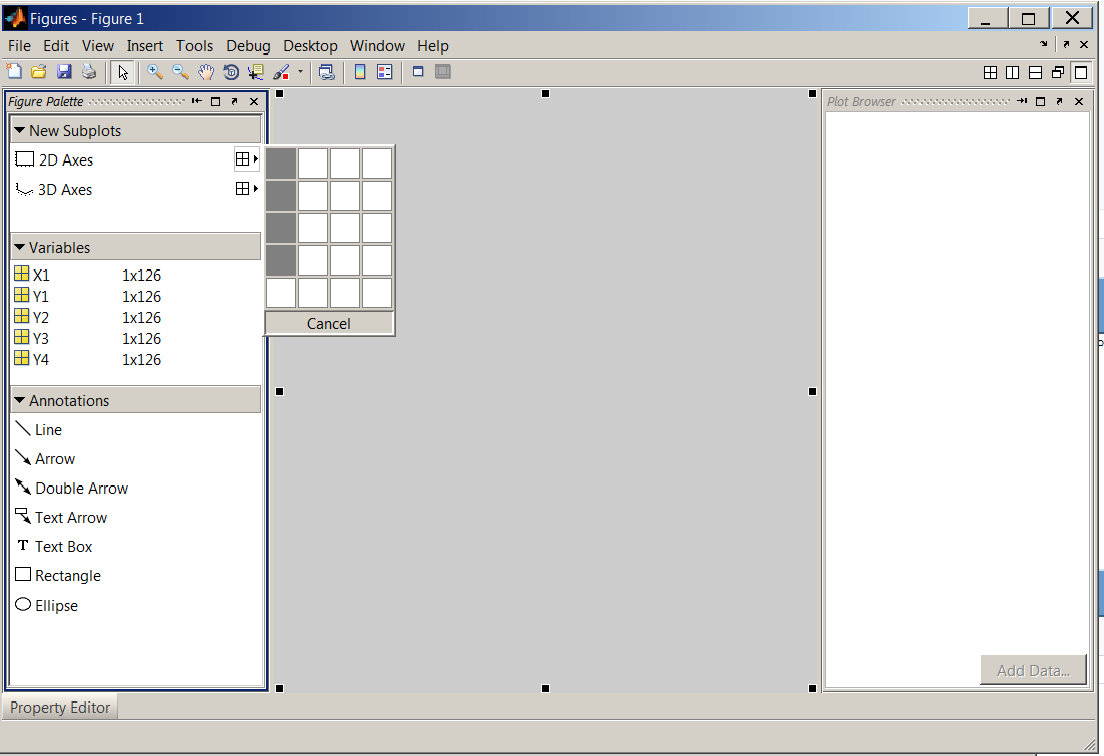
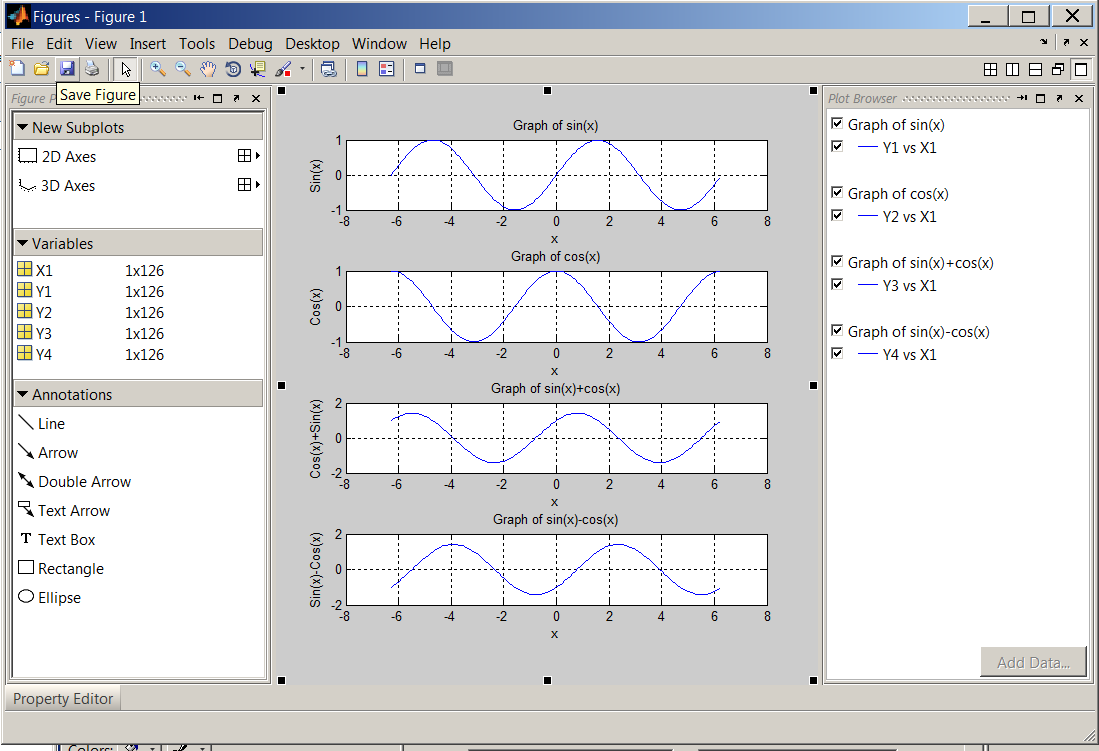
Under New Subplots>2D Axes, select four vertical boxes that will create four subplots in one figure. Also notice, the five variables we created earlier are listed under Variables.
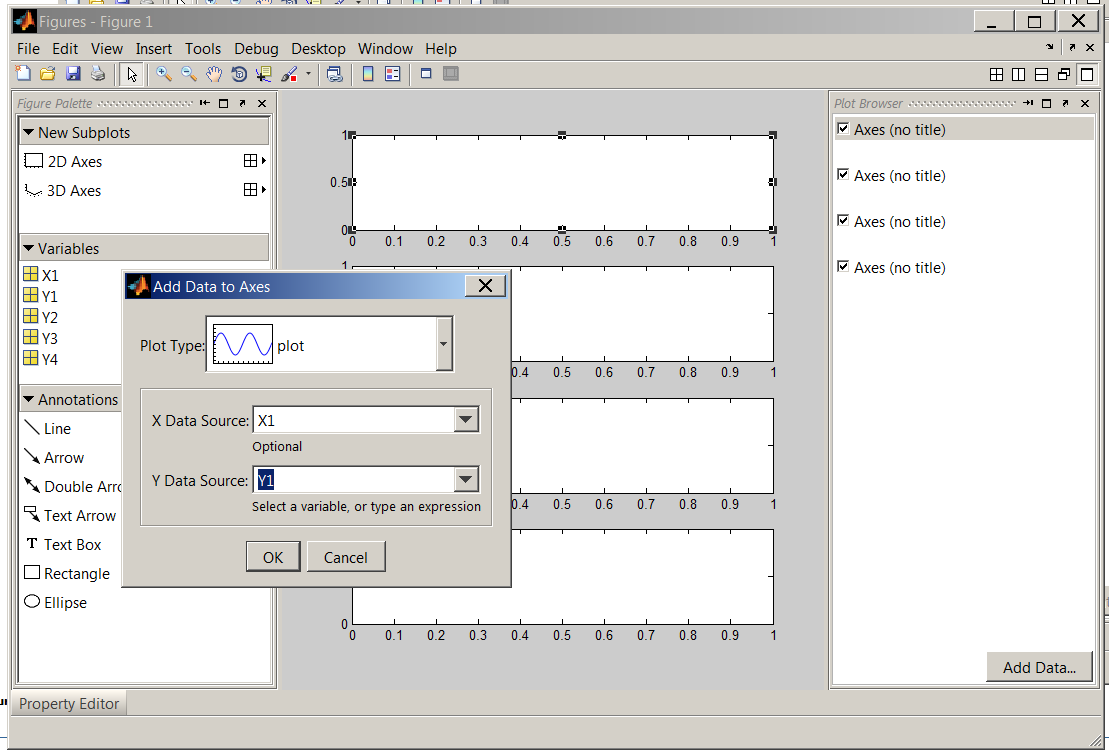
After the subplots have been created, select the first supblot and click on "Add Data". In the dialog box, set X Data Source to X1 and Y Data Source to Y1. Repeat this step for the remaining subplots paying attention to Y Data Source (Y2, Y3 and Y4 need to be selected in the subsequent steps while X1 is always the X Data Source).
Next, select the first item in "Plot Browser" and activate the "Property Editor". Fill out the fields as shown in the figure below. Repeat this step for all subplots.
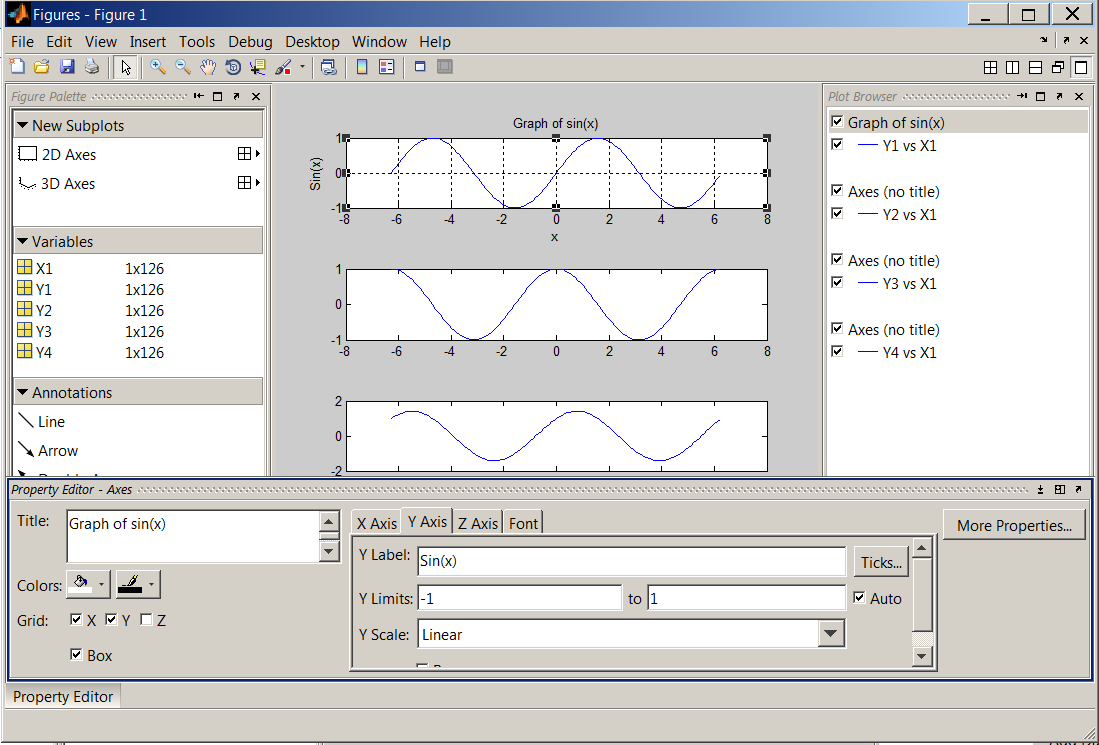
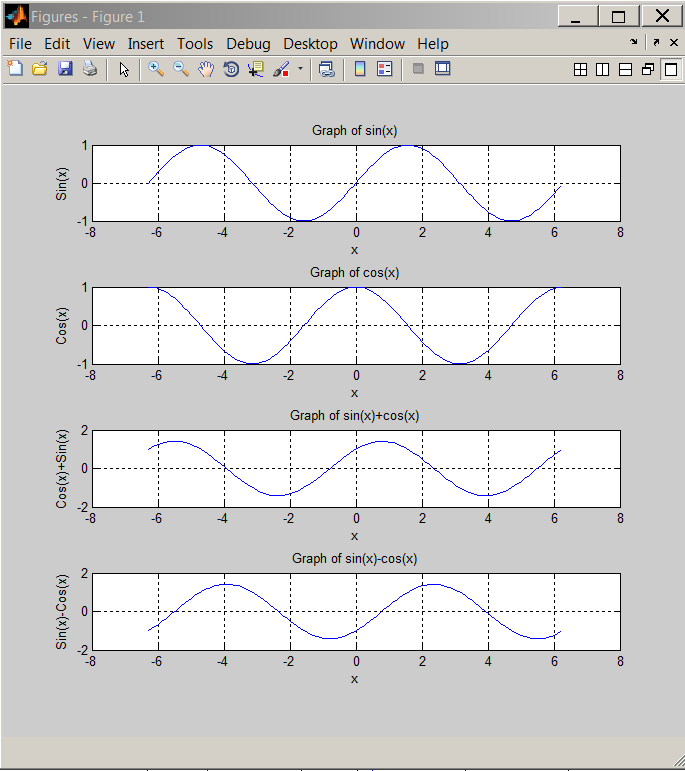
Save the figure as
sinxcosx.fig in the current directory.
3D plots can be generated from the Command Window as well as by GUI alternatives. This time, we will go back to the Command Window.
plot3 StatementWith the X1,Y1,Y2 and Y2 variables still in the workspace, type in
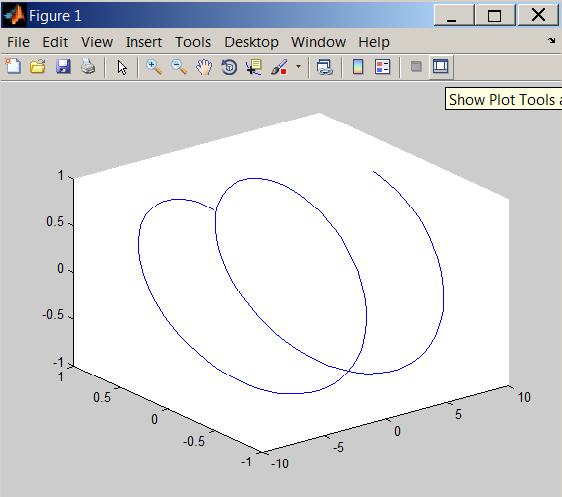
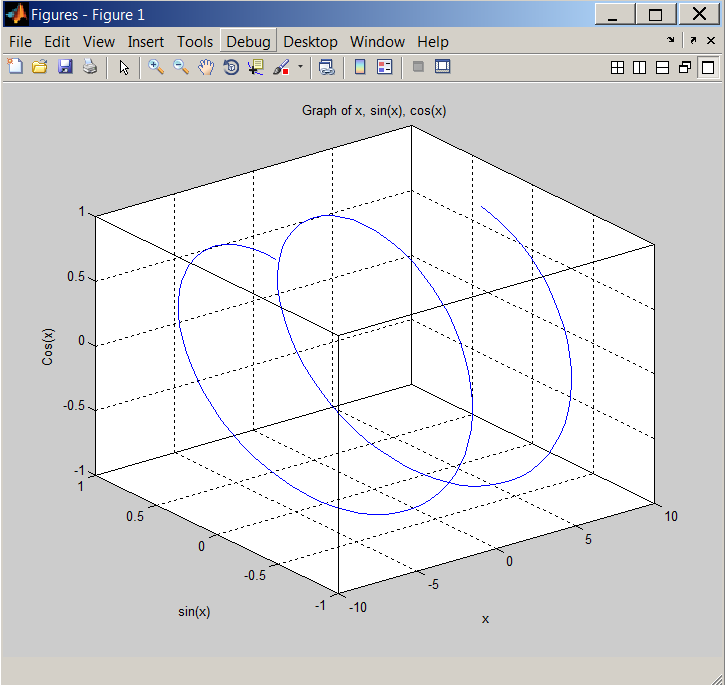
plot3(X1,Y1,Y2) at the MATLAB prompt. A figure will be generated, click "Show Plot Tools and Dock Figure".
plot3 .
Use the property editor to make the following changes.
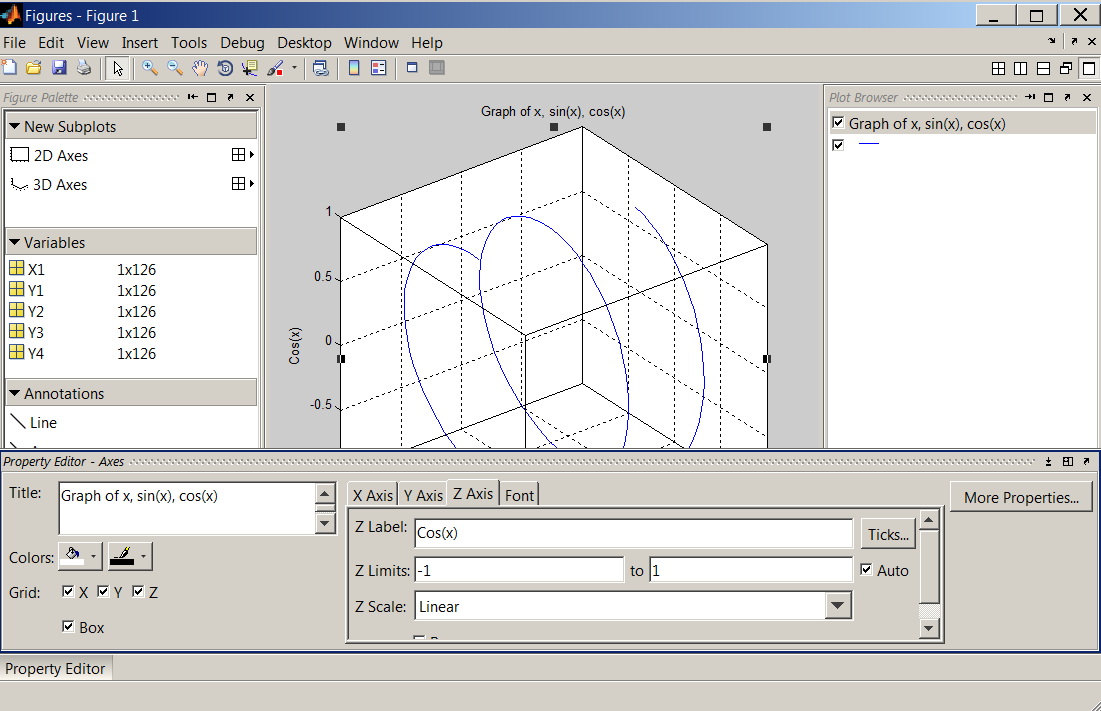
The final result should look like this:
Use
help or
doc commands to learn more about 3D plots, for example,
image(x) ,
surf(x) and
mesh(x) .
To plot vectors, it is useful to draw arrows so that the direction of the arrow points the direction of the vector and the length of the arrow is vector’s magnitude. However the standard plot function is not suitable for this purpose. Fortunately, MATLAB has
quiver function appropriately named to plot arrows.
quiver(x,y,u,v) plots vectors as arrows at the coordinates (x,y) with components (u,v). The matrices x, y, u, and v must all be the same size and contain corresponding position and velocity components.
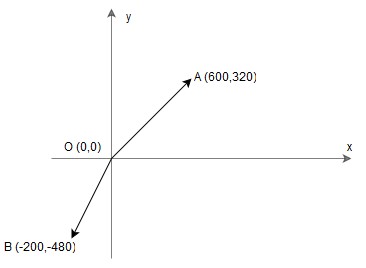
Calculate the magnitude of forces OA, OB and the resultant R of OA and OB shown below. Plot all three forces on x-y Cartesian coordinate system
Applied Engineering Mechanics by A. Jensen, H. Chenoweth McGraw-Hill Ryerson Limited © 1972, (p. 15) .
% Preparation
clear % removes all variables from the current workspace,% releasing them from system memory.
clc % clears all input and output from the Command Window display,% giving you a "clean screen."
% Input and ComputationOA=[600 320]; % Force 1magOA=sqrt(sum(OA.^2));
OB=[-200 -480]; % Force 2
magOB=sqrt(sum(OB.^2));OC=OA+OB; % The resultant of OA and OB
magOC=sqrt(sum(OC.^2)); % The magnitude of resultant force OCangleMag=atan(OC(2)/OC(1))*180/pi; % angle of OC in degrees
% Outputdisp(' ') % Display blank line
str1= ['The magnitude of the resultant force is ', num2str(magOC), ' N.'];
disp(str1);str2= ['The angle of the resultant force is ', num2str(angleMag), ' degrees.'];disp(str2);
% Plot Preparationstarts = zeros(3,2); % Origin for all 3 forces, 3x2 "zero" matrix
ends = [OA;OB;OC]; % End point for all 3 forces
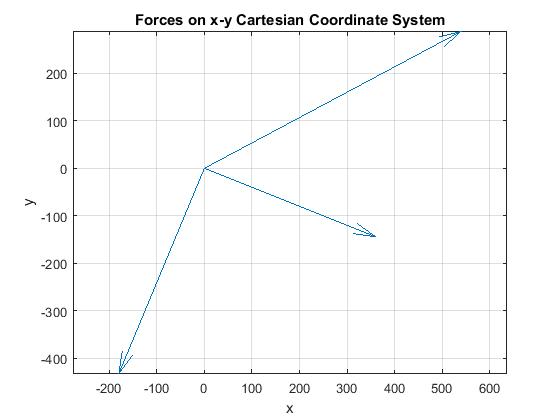
vectors = horzcat(starts,ends); % Concatenate arrays horizontally% Plot Forces on x-y Cartesian Coordinate System
% The following MATLAB function plots vectors as arrows% at the coordinates specified in each corresponding
% pair of elements in x and y.quiver( vectors( :,1 ), vectors( :,2 ), vectors( :,3 ), vectors( :,4 ));
axis equalgrid
title('Forces on x-y Cartesian Coordinate System')xlabel('x') % x-axis label
ylabel('y') % y-axis labelview(2) % setting view to 2-D
quiver function.
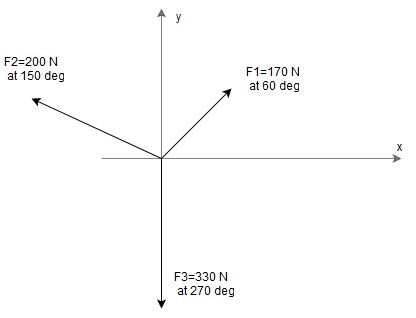
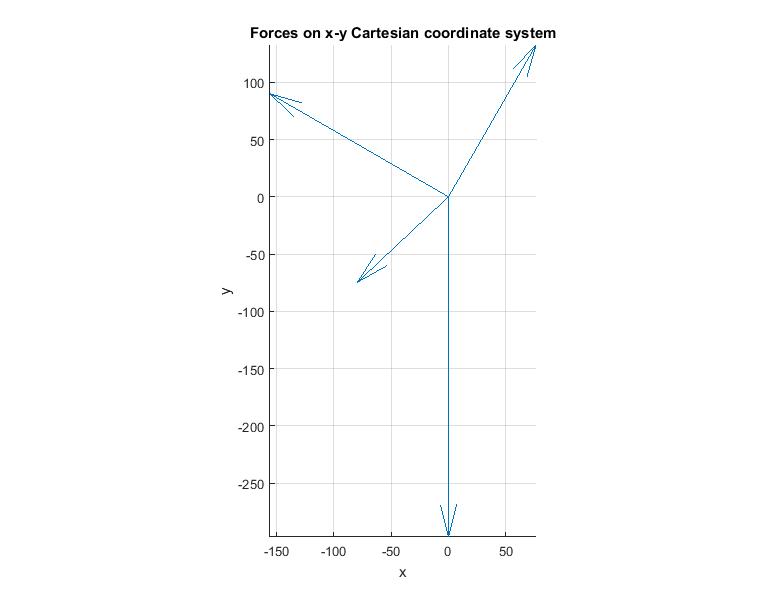
Write an interactive script to calculate the resultant R of forces F1, F2 and F3 shown below and plot all four forces on x-y Cartesian coordinate system
Applied Engineering Mechanics by A. Jensen, H. Chenoweth McGraw-Hill Ryerson Limited © 1972, (p. 15) .
clear
clcdisp('This script computes the resultant of three forces on x-y Cartesian coordinate system.')
f1=input('Enter the magnitude of first force in N: ');theta1=input('Enter the angle of first force in deg: ');
f2=input('Enter the magnitude of second force in N: ');theta2=input('Enter the angle of second force in deg: ');
f3=input('Enter the magnitude of third force in N: ');theta3=input('Enter the angle of third force in deg: ');
x1=f1*cos(theta1*pi/180); % The components of forcey1=f1*sin(theta1*pi/180); % The components of force
F1=[x1 y1]; % Force 1
x2=f2*cos(theta2*pi/180); % The components of forcey2=f2*sin(theta2*pi/180); % The components of force
F2=[x2 y2]; % Force 2
x3=f3*cos(theta3*pi/180); % The components of forcey3=f3*sin(theta3*pi/180); % The components of force
F3=[x3 y3]; % Force 3
R=F1+F2+F3; % The resultant of F1, F2 and F3magR=sqrt(sum(R.^2)); % The magnitude of resultant force R
angle=atan(R(2)/R(1))*180/pi; % Angle of R in degreesdisp(' ') % Display blank line
str1= ['The magnitude of the resultant force is ', num2str(magR), ' N.'];
disp(str1);str2= ['The angle of the resultant force is ', num2str(angle), ' degrees.'];
disp(str2);starts = zeros(4,3);
ends = [F1;F2;F3;R];
ends(3,3)=0; % inputs 0s for z components, making it 3Dvectors = horzcat(starts,ends); % Concatenate arrays horizontally
quiver3( vectors( :,1 ), vectors( :,2 ), vectors( :,3 ), vectors( :,4 ), vectors( :,5 ), vectors( :,6 )); % A three-dimensional quiver plot displays vectors with components (u,v,w) at the points (x,y,z), where u, v, w, x, y, and z all have real (non-complex) values.axis equal
title('Forces on x-y Cartesian coordinate system')xlabel('x') % x-axis label
ylabel('y') % y-axis labelview(2)
quiver3 function.
plot(x, y) and
plot3(X1,Y1,Y2) statements create 2- and 3-D graphs respectively,title ,
xlabel ,
ylabel and
legend ,quiver and
quiver3 plots are useful for making vector diagrams.Notification Switch
Would you like to follow the 'A brief introduction to engineering computation with matlab' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|