

| << Chapter < Page | Chapter >> Page > |
Khi điện trở của đĩa than thay đổi thì điện áp rơi trên nó cũng thay đổi, kết quả làm cho điện áp đầu ra UR được duy trì không đổi.
Hình 9-13: Ổn áp điện trở tiếp xúc
Ổn áp kiểu servomotor còn được gọi là ổn áp dùng servomotor kéo chổi than theo nguyên lí điện cơ. Nguyên lí làm việc của nó là dùng một mạch điều khiển bằng linh kiện bán dẫn điện tử để điều khiển động cơ thừa hành làm nhiệm vụ ổn định điện áp.

Sơ đồ nguyên lí làm việc như hình minh họa.
Phần chính là một biến áp tự ngẫu BA có lõi hình xuyến, đầu vào lấy điện qua con chạy S. Để giữ điện áp ra Ur không đổi ta phải thay đổi điện áp vào Uv cho phù hợp bằng cách điều khiển tự động con chạy S. Việc điều chỉnh S được thực hiện nhờ động cơ M. Động cơ này được điều khiển bằng bộ so sánh mức độ sai lệch giữa điện áp mẫu Ur’ (Ur’ là đại diện cho Ur) và điện áp chuẩn. Sơ đồ khối mạch điều khiển được trình bày như hình 9-15.
THĐLCLUvUrU’rHình 9-15 : Sơ đồ khối mạch điều khiển ổn ápMM
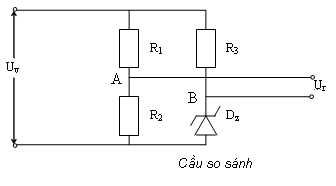
Điện áp Ur sau khi qua bộ chỉnh lưu (CL) có điện áp Ur’. Bộ đo lường là một mạch cầu gồm ba nhánh điện trở R1, R2, R3 và một nhánh điôt zener Dz được vẽ trên hình 9-16.
Điện áp giữa hai nhánh của cầu là Ur’ (điện áp chỉnh lưu của Ur ), U là điện áp giữa hai đỉnh chéo AB của cầu. Các trị số điện trở R1, R2, R3 được tính toán như thế nào để khi Ur= Urđm thì có U= 0. Giá trị U sai lệch được khuếch đại lên thành giá trị U1 lớn hơn nhiều lần. U1 này được đưa đến khối thực hiện TH để khối này nhận biết điều khiển chiều quay của động cơ M, kéo theo con trượt S chạy. Ta có cụ thể như sau:
+Khi điện áp ra Ur tăng xuất hiện sự sai lệch điện áp là U, sự sai lệch này được khuếch đại thành U1 lớn gấp nhiều lần để cung cấp cho động cơ M quay theo chiều giảm(chiều ngược), kéo theo con trượt S chạy đến khi Ur ổn định (Ur=Urđm).
+Khi điện áp ra Ur giảm xuất hiện sự sai lệch điện áp là U, sự sai lệch này được khuếch đại thành U1 lớn gấp nhiều lần để cung cấp cho động cơ M quay theo chiều tăng (chiều thuận), kéo theo con trượt S chạy đến khi Ur ổn định (Ur=Urđm).
Ổn áp loại này có các ưu điểm: điện áp ra ổn định, làm việc tin cậy, dạng điện áp ra ít bị méo dạng, phạm vi thay đổi điện áp rộng, hiệu suất cao và rất tiện lợi khi chế tạo ở công suất nhỏ. Tuy nhiên nó có một số nhược điểm là: cấu tạo khá phức tạp, do có hệ thống chổi than nên gây ồn khi làm việc và dễ sinh cháy nổ, do vậy loại này khó thực hiện ở công suất lớn và giá thành cao.
Nguyên lí làm việc của ổn áp kiểu bù tương tự như ổn áp kiểu servomotor. Hình 9-17 là sơ đồ nguyên lí của loại ổn áp kiểu bù.

Mục đích của cuộn bù là bù thêm một lượng điện áp thích hợp để có điện áp ra ổn định. Phương trình cân bằng điện áp là: Uv= Ur + Ub
Việc thay đổi lượng điện áp bù nhờ biến áp tự ngẫu. Mạch điều khiển có nhiệm vụ so sánh và khuếch đại điện áp ra thay đổi để điều khiển servomotor M theo hai chiều quay thuận hoặc quay ngược. Servomotor M lại điều khiển từ biến áp tự ngẫu T làm cho nó cung cấp một lượng điện áp có véc tơ dương hoặc âm cho biến thế B. Thứ cấp của B nối nối tiếp với mạch động lực giữa đầu vào và đầu ra.

Thực tế điện áp lưới dao động từ Umin đến Umax nên thường phương án được đưa ra là bù một lượng U và do một biến áp khác đảm nhiệm. Sơ đồ nguyên lí như hình 9-18. Khi có Uv nhỏ hơn một trị số điện áp đặt Uđ thì biến áp BA1 làm việc (Triac T1 dẫn, Triac T2 ngưng dẫn) bù một lượng điện áp U do đó điện áp của biến áp BA2 luôn luôn lớn hơn Uđ. Khi điện áp Uv cao thì biến áp BA1 ngưng làm việc. Biến áp BA2 làm nhiệm vụ bù lượng điện áp U để điện áp ra ổn định, việc bù này nhờ thay đổi Uđk theo vị trí chổi than con trượt của biến áp vi sai. Khi các biến áp BA1, BA2 không cần thiết phải bù thì thiết bị tự ngắt mạch sơ cấp của nó để tránh hiện tượng bão hòa mạch từ làm tăng tổn hao công suất.
Ưu điểm của ổn áp kiểu bù là chất lượng điện áp tốt ít bị méo dạng, độ tin cậy làm việc cao, các phần tử điều khiển lượng công suất bé( của BA1 và BA2 ) nên dễ chế tạo ổn áp ở công suất lớn, hiệu suất cao và giá hạ. Tuy nhiên loại này cũng tồn tại một số nhược điểm: khó chế tạo và thiết kế, sử dụng chổi than nên gây ồn và dễ cháy nổ, loại này thường được chế tạo với công suất lớn.
Ổn áp gồm một biến áp tự ngẫu T2 , cuộn dây bù điện áp T1 và mạch điều khiển là các linh kiện bán dẫn. Nguyên lí làm việc loại này tương tự loại servomotor, nhưng ở đây động cơ thừa hành servomotor và con chạy S được thay thế bằng mạch điều khiển dòng điện và cuộn dây bù điện áp T1. Khi điện áp thay đổi, mạch điều khiển sẽ phân tích để bù lượng điện áp thích hợp đảm bảo điện áp ra ổn định. Hình 9-19 là sơ đồ nguyên lí của ổn áp điện tử.

Ưu nhược điểm của ổn áp điện tử
Ngoài các ưu điểm đạt được như loại servomotor, loại này còn khắc phục được các nhược điểm là không gây ồn hoặc cháy nổ. Tác động rất nhanh , nhạy và khối lượng nhẹ.
Tuy nhiên nó cũng có các nhược điểm là khá phức tạp khi thiết kế, chế tạo mạch điều khiển, công suất chế tạo loại ổn áp này không lớn và giá thành sản xuất khá cao.
Notification Switch
Would you like to follow the 'Giáo trình thiết bị điện' conversation and receive update notifications?

|
|

|
|
|
|
|

|
|

|
|
|
|
|
|
|
|

|
|

|
|

|