

| << Chapter < Page | Chapter >> Page > |
As mentioned earlier, this design problem might be addressed by general constrained quadratic programming methods [link] , [link] , [link] , [link] , [link] , [link] , [link] , [link] , [link] , [link] .
Here we show that the CLS FIR filter design approach is probably the best general FIR filter design method. For example, a length-31 linear phase lowpass FIRfilter is designed for a band edge of 0.3 and the constraint that the response in the stop cannot be greater than 0.03 is illustrated in [link] .
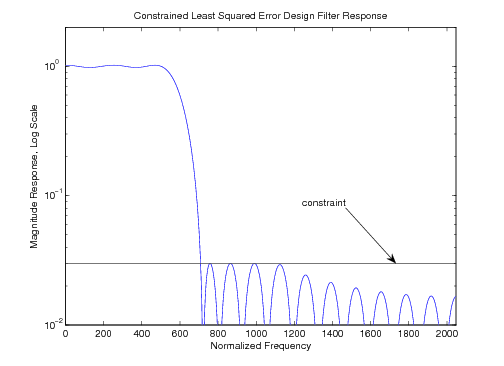
This filter was designed using the Matlab command: '
fircls1() ' function.
We now consider the general approximation which contains the least squares and the Chebyshev cases. This approach is described in [link] , [link] , [link] using the iterative reweighted least squared (IRLS) alorithm and looks attractive in that it can use different in different frequency bands. This would allow, for example, a least squared error approximation in thepassband and a Chebyshev approximation in the stopband. The IRLS method can also be used for complex Chebyshev approximations [link] and constrained approximatin.
There are cases where it is desirable to design an FIR filter that will minimize the error norm. The error is defined by
but we usually work with . For large , the results are essentially the same as the Chebyshev filter and this gives a continuum of design between and . It also allows the very interesting important possibility of allowing to be a function of frequency. This means one could have different error criteria in different frequency bands. It can be modifiedto give the same effects as a constraint. This approach is discussed in [link] . It can be applied to complex approximation and to two-dimensional filter design [link] , [link] .
The least squared error and the minimum Chebyshev error criteria are thetwo most commonly used linear-phase FIR filter design methods [link] . There are many situations where better total performance would be obtainedwith a mixture of these two error measures or some compromise design that would give a trade-off between the two. We show how to design a filterwith an approximation in the passband and a Chebyshev approximation in the stopband. We also show that by formulating the problem we can solve the constrained approximation problem [link] .
This section first explores the minimization of the power of the error as a general approximation method and then shows how this allows and approximations to be used simultaneous in different frequency bands of one filter and how the method can be used to imposeconstraints on the frequency response. There are no analytical methods to find this approximation, therefore, an iterative method is used oversamples of the error in the frequency domain. The methods developed here [link] , [link] are based on what is called an iterative reweighted least squared (IRLS) error algorithm [link] , [link] , [link] and they can solve certain FIR filter design problems that neither the Remezexchange algorithm nor analytical methods can.
Notification Switch
Would you like to follow the 'Digital signal processing and digital filter design (draft)' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|
|
|