

| << Chapter < Page | Chapter >> Page > |
------------------------------------------------------------------------------------------------------------------------------------------------------------
state_vecs = zeros(3,length(t)); % Initialize matrix for position,
% velocity and acceleration statestrans_mat = [1 dt (1/2)*(dt^2); 0 1 dt; 0 0 1]; % Initialize state% derivation matrix
prv_states = zeros(3,length(t)); % Matrix for previous statesprv_states(3,:) = Acc_t; % Set acceleration vector in previous states
for i=1:length(t)-1state_vecs(1,i) = trans_mat(1,:)*prv_states(:,i); % Derive position
state_vecs(2,i) = trans_mat(2,:)*prv_states(:,i); % Derive velocitystate_vecs(3,i) = trans_mat(3,:)*prv_states(:,i); % Derive acceleration
prv_states(1,i+1) = state_vecs(1,i); % Use current states to derive% future values
prv_states(2,i+1) = state_vecs(2,i);end
s_comp = state_vecs(1,:); % Position vectorv_comp = state_vecs(2,:); % Velocity vector
a_comp = state_vecs(3,:); % Acceleration vectorfigure;
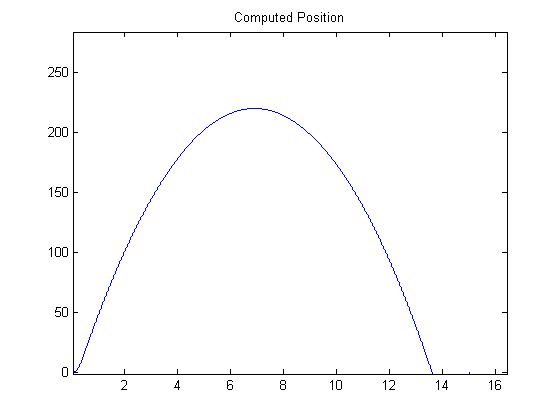
plot(t,s_comp) % Show plot of computed positiontitle('Computed Position')
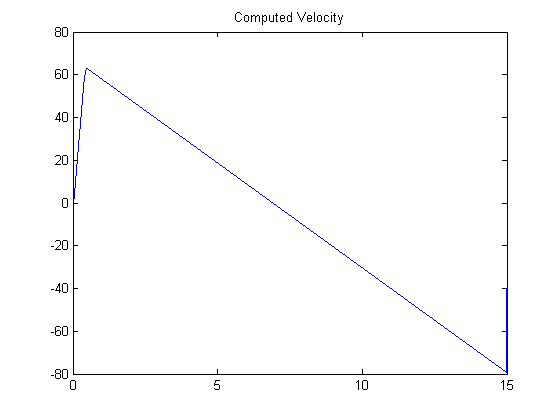
figure;plot(t,v_comp) % Show plot of computed velocity
title('Computed Velocity')figure;
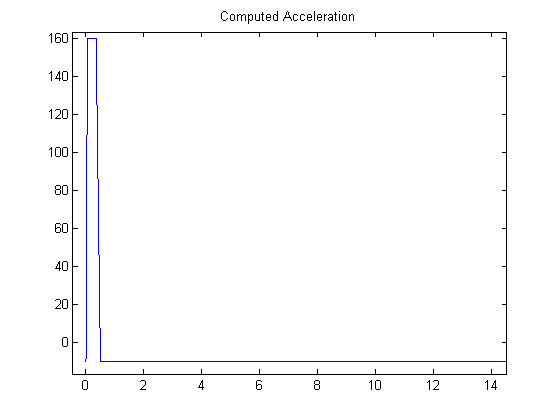
plot(t,a_comp) % Show plot of computed accelerationtitle('Computed Acceleration')
[apogee,t_index]= max(s_comp); % Determine and display actual apogee
disp('Actual Apogee occurs at t =')disp(t(t_index))
------------------------------------------------------------------------------------------------------------------------------------------------------------
Using the var() command in MATLAB, we determined that the measured data from the rocket launch got corrupted with Gaussian noise with mean=0 and different variances for position, velocity, and acceleration.
| State | Variance |
|---|---|
| Position | 5.985 |
| Velocity | 2 |
| Acceleration | 0.0346 |
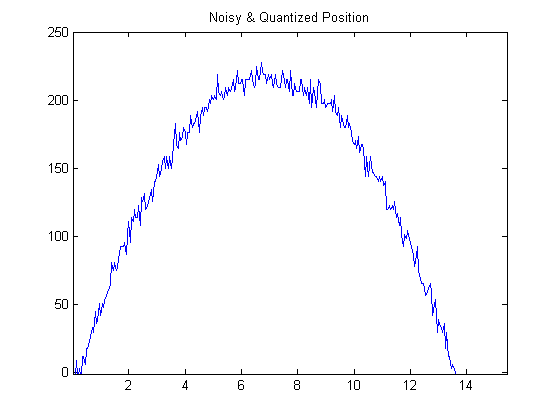
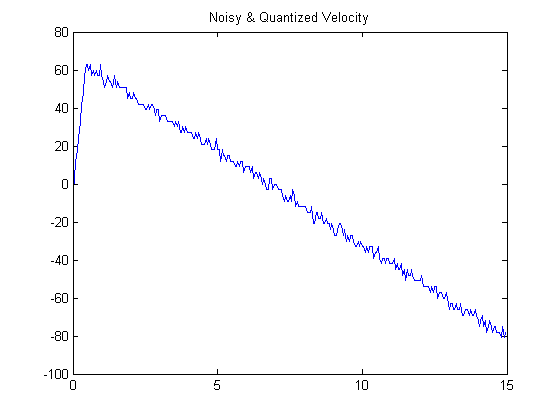
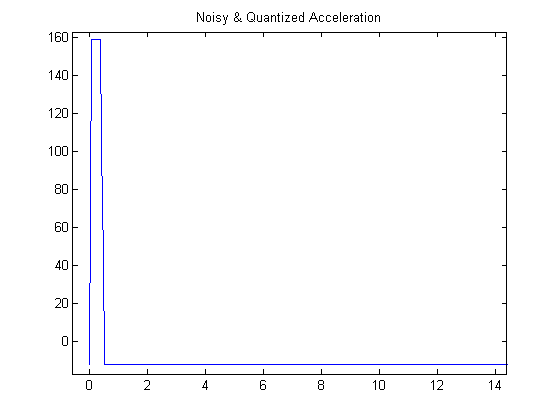
In addition, we introduced A/D quantization from our sensors into the position, velocity, and acceleration states. Specifically, the sensors introduced a time quantization of 50ms and an amplitude quantization in increments of three (see [link] , [link] [link] ):
------------------------------------------------------------------------------------------------------------------------------------------------------------
% Measurement noise
% Position corrupted with Gaussian noise with standard deviation = 5.985s_n = state_vecs(1,:)+(5.985.*randn(1,length(t)));
% Velocity corrupted with Gaussian noise with standard deviation = 2v_n = state_vecs(2,:)+(2.*randn(1,length(t)));
% Position corrupted with Gaussian noise with standard deviation = 0.0346a_n = state_vecs(3,:)+(0.0346.*randn(1,length(t)));
figure;plot(t,s_n) % Plot noisy position
title('Noisy Position')figure;
plot(t,v_n) % Plot noisy velocitytitle('Noisy Velocity')
figure;plot(t,a_n) % Plot noisy acceleration
title('Noisy Acceleration')%Quantization
%Time Quantized to 0.05 seconds%Amplitude quantization is 3 meters
t_q = t(1:50:end);s_n_q = floor(s_n(1,1:50:end)./3).*3;
v_n_q = floor(v_n(1,1:50:end)./3).*3;a_n_q = floor(a_n(1,1:50:end)./3).*3;
figure;plot(t_q,s_n_q) % Plot noisy and quantized position
title('Noisy and Quantized Position')figure;
plot(t_q,v_n_q) % Plot noisy and quantized velocitytitle('Noisy and Quantized Velocity')
figure;plot(t_q,a_n_q) % Plot noisy and quantized acceleration
title('Noisy and Quantized Acceleration')
------------------------------------------------------------------------------------------------------------------------------------------------------------
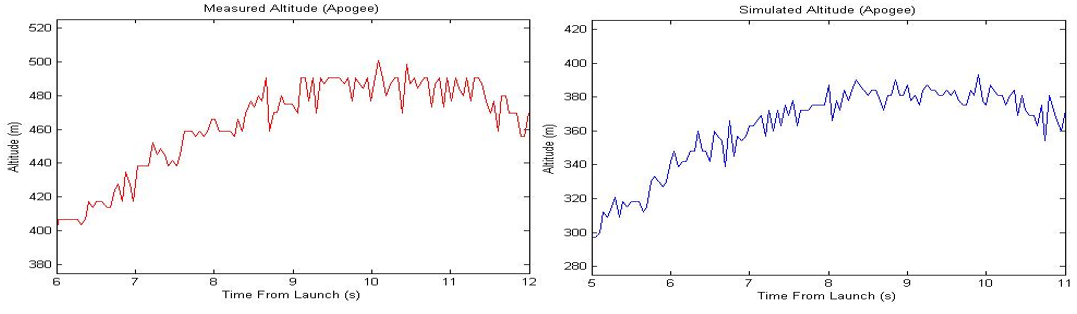
Once corrupted with noise and quantized, the simulation provides an accurate approximation of our measured data, and allows for multiple simulated, random, and parameterized rocket tests (see [link] ):
Notification Switch
Would you like to follow the 'Digital detection of rocket apogee' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|
|
|
|
|
|
|

|
|

|