

| << Chapter < Page | Chapter >> Page > |
drx =
Hình 7-9: Mạch đo mức chất lỏng dùng cảm biến Vì b<<hx và coi như b+hx hx nên có:
drx .
Ứng dụng cảm biến điện trở trong bể đo mức chất lỏng hình 7-9.
Trong đó:
Dựa trên nguyên lí sự thay đổi điện trở tiếp xúc giữa các hạt than khi lực ép lên (áp lực) trên chúng thay đổi.
Cấu tạo: gồm các hạt than được kết dính theo một phương pháp nhất định thành các đĩa đường kính từ 5 đến 30 mm dày 1mm đến 2mm. Mỗi cảm biến gồm 10 đến 15 đĩa than xếp chồng nên nhau và có điện trở khoảng vài chục Ôm. Để tăng độ ổn định khi làm việc cảm biến được đặt dưới áp suất ban đầu (khi không tải) khoảng 20kg/cm2, áp suất lớn nhất khi làm việc (có tải) đến (50 60) kg/cm2 thì điện trở cảm biến giảm (20 30)%. Đại lượng vào là lực F ra là Rk đặc tính vào ra như hình minh họa.
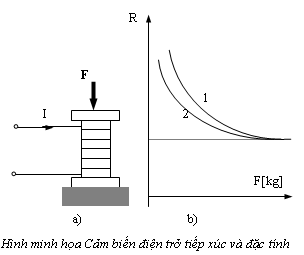
quan hệ Rk = f(F) mô tả theo công thức : , với:
Nếu cảm biến gồm n đĩa thì:
Quan hệ Rk = f(F) là phi tuyến khi F tăng đến một giá trị nào đó thì Rk không giảm nữa và có tính chất trễ như đặc tính hình 7-10 là do tính chất không đàn hồi của vật liệu tạo nên. Đây là một nguyên nhân gây ra sai số, ngoài ra khi nhiệt độ tăng thì điện trở cảm biến giảm ( tăng do môi trường hoặc do tổn hao trong cảm biến).
Ưu điểm : đơn giản, chất tạo từ vật liệu rẻ tiền, công suất tương đối lớn tới hàng trăm W và dòng qua đến vài A, không cần cơ cấu khuếch đại. Thường dùng đo áp lực và trong các bộ phận tự động điều chỉnh điện áp máy phát một chiều và xoay chiều.
Ví dụ: cảm biến trong tự động điều chỉnh điện áp máy phát một chiều hình 7-11 gồm:
Hình 7-11: Tự động điều chỉnh điện áp máy điện một chiều1-nam châm điện một chiều có cuộn dây nối song song với điện áp máy phát, lực hút nam châm sẽ thay đổi tùy điện áp ra.
2- lò xo cân bằng với lực nam châm 1, tạo ra lực ép lên đĩa than nhờ tay đòn 3, bộ phận thừa hành là cảm biến 4 nối với mạch kích từ máy phát.
Ta biết rằng khi có lực tác dụng vào vật dẫn thì kích thước và cấu trúc của chúng sẽ thay đổi làm điện trở thay đổi. Lợi dụng tính chất này người ta chế tạo cảm biến biến dạng dùng để đo và kiểm tra các lực biến dạng cơ của các chi tiết máy, có loại kiểu dây quấn, kiểu bán dẫn.
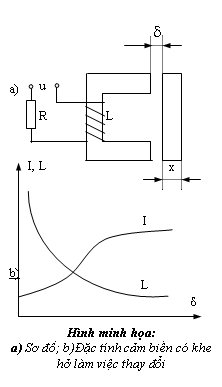
Hình minh họa là loại cảm biến điện cảm đơn giản nếu bỏ qua từ trở lõi thép, từ thông rò và từ thông tản khe hở không khí làm việc thì ta có điện cảm.
Notification Switch
Would you like to follow the 'Giáo trình thiết bị điện' conversation and receive update notifications?

|
|

|
|

|
|
|
|
|

|
|

|
|

|
|

|
|

|
|

|