

| << Chapter < Page | Chapter >> Page > |
H8l = ( U2C2u ) ( 3 - 2 )
Phương trình Euler ( 3 - 1 ) được thành lập trên cơ sở những giả thiết đã nêu là cơ sở để áp dụng vào chế tạo máy bơm thực tế. Hiện nay các máy bơm li tâm có số cánh từ 6 ... 12, khe cánh ngắn, cánh có độ dày nhất định mới chịu được lực ... do vậy dòng chảy không thể bám sát vào cánh vì vậy có xoáy nước hướng trục phát sinh. Người ta đã có nhiều nghiên cứu so sánh kết quả giữa lý thuyết và thực nghiệm.

Hình 3 - 3. Sơ đồ chuyển động tương đối của chất lỏng trong các
ránh BXCT có cánh quạt hữu hạn.
I,II- chuyển động tịnh tiến và chuyển động quay; III- biểu đồ phân bố vận tốc tương đối W và áp suất tĩnh p cm trong mặt cắt ngang ở các rãnh giữa các cánh BXCT.
Mỗi cánh của BXCT bơm li tâm đều "áp" vào chất lỏng làm cho chất lỏng chảy vòng. Bởi vậy áp lực tĩnh ở mặt trước sẽ lớn hơn ở mặt sau. Trên cơ sở của phương trình Bernulli đối với chuyển động tương đối thấy rằng dọc mặt trước cánh, chất lỏng chuyển động với vận tốc tương đối sẽ nhỏ hơn mặt sau của cánh. Chuyển động tuyệt đối của rãnh giữa các cánh, nhìn bình đồ là chuyển động quay với tốc độ góc bằng tốc độ góc của BXCT, đồng thờì do có lực quán tính sinh ra chuyển động tịnh tiến của chất lỏng chống lại chuyển động quay này.Tổng hợp hai dạng chuyển đông trên chúng ta nhận được biểu đồ gần đúng của vận tốc tương đối W. Chuyển động quay tương đối của chất lỏng trong rãnh có khác tốc độ tương đối trung bình: ở cửa ra: W2 quay ngược với chiều quay cửa BXCT, còn ở cửa vào lại quay cùng chiều với BXCT ( xem II, Hình 3 - 2 ).
Hiện tượng thủy động xẩy ra trong BXCT rất phức tạp và chưa có lời giải thỏa đáng cuối cùng. Bởi vậy chưa thể thành lập được phương trình đúng về sự phụ thuộc của cột nước vào số lượng cánh. Người ta vẫn phải sử dùng phương trình Euler với số cánh vô hạn nhưng đưa thêm vào hệ số hiệu chỉnh K có kể đến thực tế là số cánh Z hữu hạn. Trong thực tế thường dùng công thức của K. Pờplâyder sau đây để tính cột nước lý tưởng Hl số cánh hữu hạn:
Hl = K H8l ( 3 - 3 )
Trong đó hệ số hiệu chỉnh K được xác định như sau:
K = ( 3 - 4 )
Hệ số K cũng có thể lấy gần đúng theo tài liệu sau đây, tùy thuộc vào tỷ tốc ns:
| ns ( v/ph ) | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 | 250 |
| K | 0,78 | 0,8 | 0,81 | 0,82 | 0,805 | 0,77 | 0,715 | 0,675 | 0,55 |
Ý nghĩa vật lý của phương trình cơ bản ( 3 - 1 )
Để tìm hiểu vấn đề này ta biến đổi phương trình ( 3 - 1 ) theo các đơn giản sau:
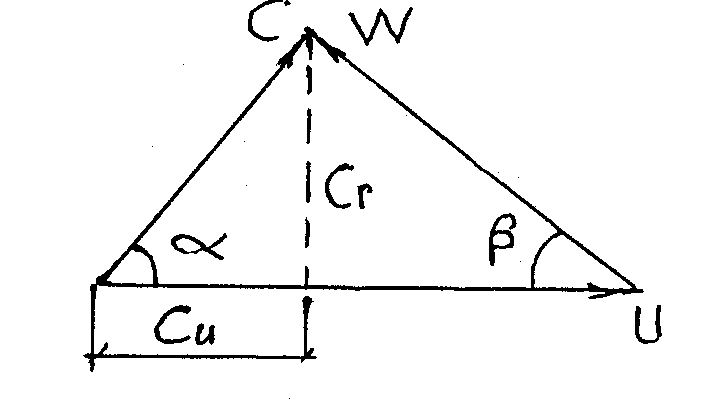
ta viết các công thức lượng gíác về thành phần vận tốc cho cửa vào và cửa ra BXCT sau:
cos và rút ra
Notification Switch
Would you like to follow the 'Máy bơm và trạm bơm' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|